What’s a Reactive System?
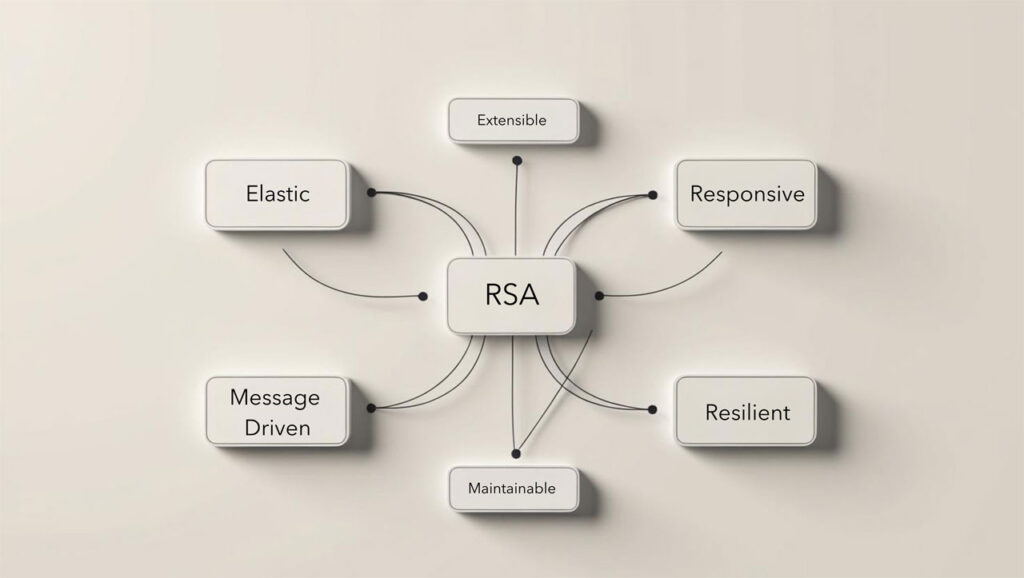
Imagine a super-smart, flexible computer system that can handle anything you throw at it. That’s basically what a Reactive System is. It’s built on four main ideas [1]:
- Responsive: It’s quick to answer, like a friend who always replies to your texts right away.
- Resilient: It bounces back from problems, like a rubber ball that always pops back up when you drop it.
- Elastic: It grows or shrinks based on how many people are using it, like a balloon that inflates or deflates.
- Message-Driven: All its parts talk to each other smoothly, like a well-organized team passing notes.
Why It’s Cool
Reactive systems are always ready to work, even under heavy load, and if one part fails, the whole system stays up. They efficiently use computer resources, saving energy and money, while making it easier to add new features without disrupting the entire system. [3]
How It Works
Reactive Systems use some fancy tech tricks:
- They break big tasks into smaller pieces (microservices).
- They use special ways to handle lots of information at once (event-driven architecture).
- They have clever ways to pass messages between different parts (asynchronous messaging).
The Big Picture
More and more companies are using Reactive Systems because they work great for modern apps and websites. They keep things running smoothly, even when millions of people are using them at the same time.
By building apps this way, tech folks can make sure your favorite websites and apps work great, no matter how popular they get!
Our Experience
We applied a similar reactive architecture in one of our Spring Boot applications, MediCare Companion. Using Spring, we built a system that’s more responsive and scalable. This approach helped us handle high loads better, improved performance with non-blocking operations, and made our microservices communicate more efficiently [2]. As a result, our application can now adapt to varying workloads and is well-prepared for future growth.
[1] https://reactivemanifesto.org
[2] https://byteink.hr/en/full-stack-development-2
[3] https://dev.to/yokwejuste/lets-talk-of-reactive-architecture-1j60


